Weighted Hough Forestによる物体検出とピッキングシステム
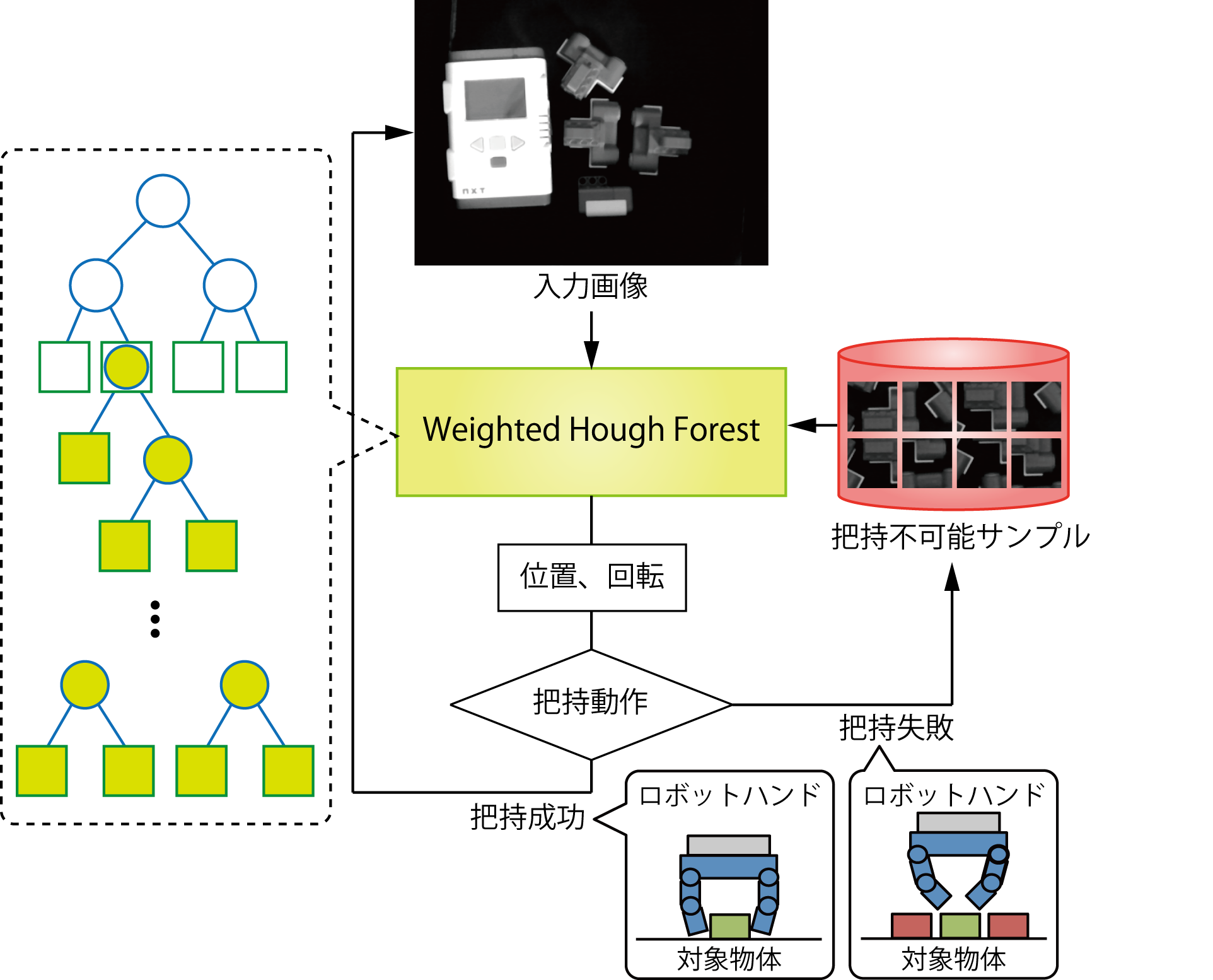
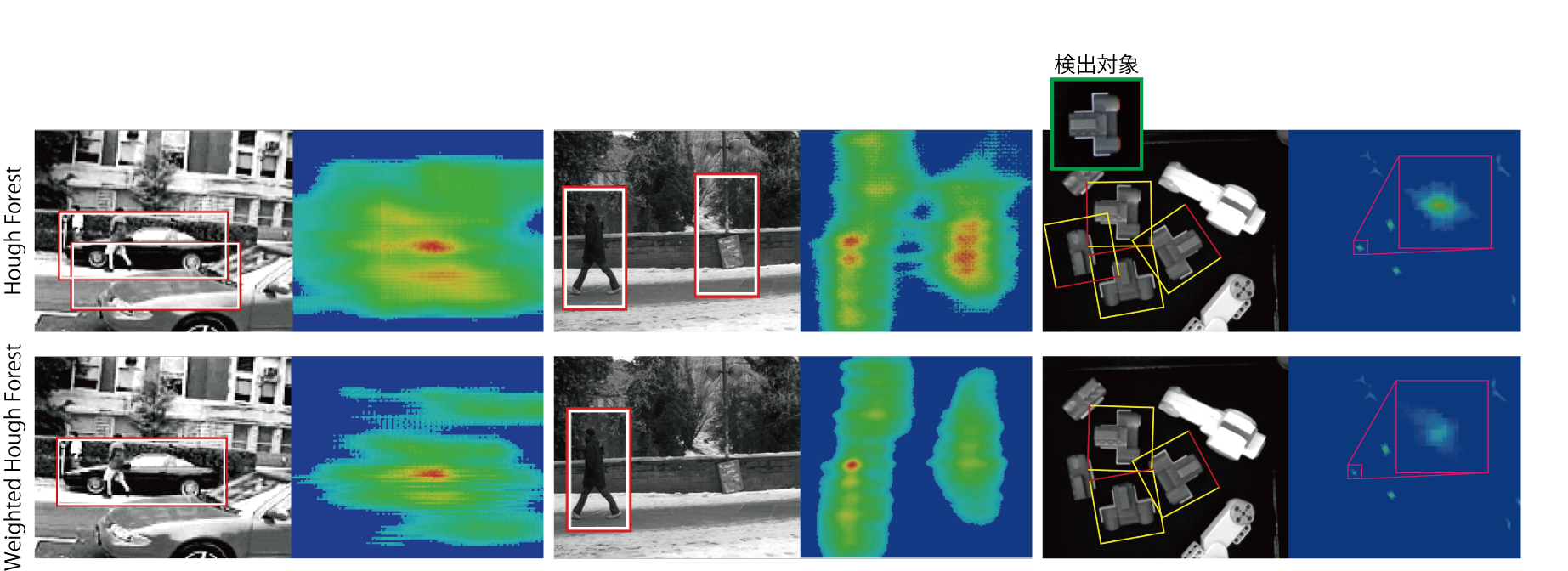
Hough Forestは,Random Forestを局所パッチの識別に応用した投票ベースの物体検出法です.Hough Forestではパッチ単位でクラスを与えているため,検出対象物体を含む教師画像から切り出したパッチにはポジティブクラス(検出対象)とネガティブクラス(背景,類似物体)のサンプルが混在してしまいます.そのため,検出の際に背景や類似物体領域にも投票するために誤検出が発生するという問題があります.そこで我々は,学習サンプルの重みを導入し,ポジティブサンプルに混在するネガティブサンプルの重みを小さくすることで,背景領域への投票を抑制するWeighted Hough Forestを提案しています.Weighted Hough Forestをピッキングシステムに導入する場合,対象物体の検出に成功しても物体同士が密着している場合は把持ができない問題があります.したがって,対象物体の検出だけではなく,対象物体が把持可能かどうか判定する必要があります.Weighted Hough Forestを用いて把持判定をするためには,把持可能な事例と把持不可能な事例を学習することで把持判定の基準を獲得する必要ですが,把持不可能な事例を大量に収集するコストは大きいです.そこで我々は,追加学習を用いてオンラインで把持判定の基準を獲得する手法の実現を目的とした追加学習法を提案しています.
Weighted Hough Forestによる物体検出
Weighted Hough Forestではポジティブサンプルと類似しているネガティブサンプルの影響を抑制するために,学習サンプルに重みを導入します.そして,決定木の階層が深くなるごとにネガティブサンプルとポジティブサンプルで類似しない特徴的なサンプルの重みが大きくなります.これにより,検出時に背景や類似物体領域への投票値を小さくすることができるため,誤検出を低減することが可能です.
Weighted Hough Forestによる物体把持判定
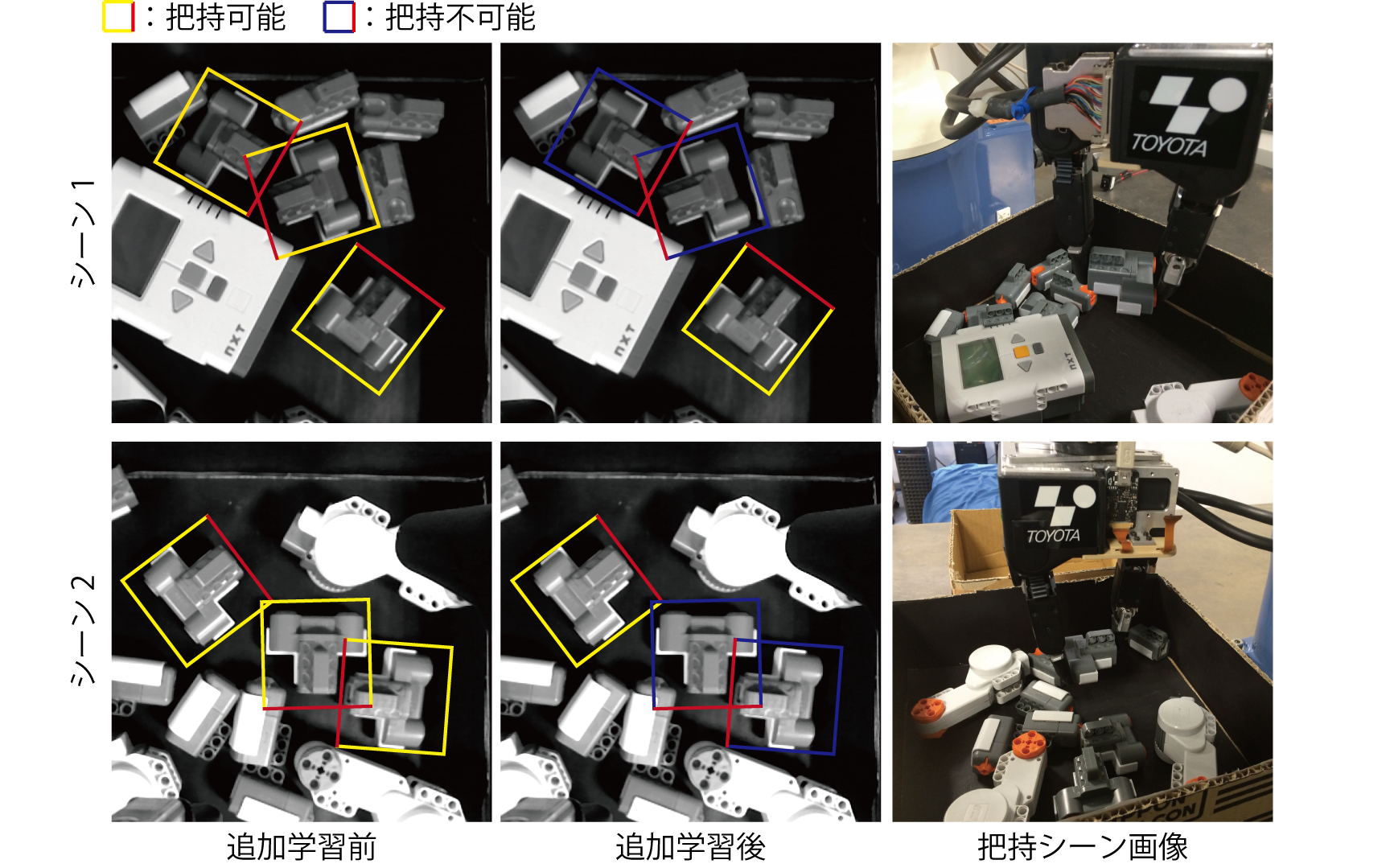
Weighted Hough Forestを用いて把持判定をするためには,把持可能な事例と把持不可能な事例を学習することで把持判定の基準を獲得する必要です.しかし,把持不可能な事例を大量に収集するコストは大きいです.そこで我々は,追加学習を用いてオンラインで把持判定の基準を獲得する手法の実現を目的とした追加学習方法を提案しています.Weighted Hough Forestは木構造を用いてサンプルを識別するため,追加学習の際に把持不可能サンプルが辿り着いた末端ノードのみを更新することで,識別器の変更を最小に抑えて把持不可能サンプルに適応できます.Weighted Hough Forestと同様に重みを導入し,把持判定に有効なサンプルが大きい重みとなるように学習を行うことで高精度な把持判定を実現しています.