Deep Convolutional Neural Networkを用いた歩行者検出の高精度化
RandomDropout+EIN from MPRG, Chubu University on Vimeo.
従来の歩行者検出法では,Histogram of Oriented Gradients(HOG)特徴量をベースとしたSupport Vector MachineやDeformable Part Modelsが一般的に用いられてきました.しかし,2012年に行われた1,000クラスの物体認識コンテストでHintonらのグループが提案したCNNを用いた手法が高い性能を出しました.その後,CNNを用いた手法が様々な認識問題において用いられています.歩行者検出においても、CNNをベースとした手法が2013年の歩行者検出のベンチマークにおいてトップの性能を出しています.しかし,ベンチマークでトップの性能を出しているCNNベースの手法は,構造が複雑になっており識別処理において計算コストが高いデメリットがあります.そこで,我々はシンプルな構造のCNNを用いて歩行者検出をすることで高精度な歩行者検出を実現しました.
Dropoutのアルゴリズムをベースとした歩行者検出の高精度化
ニューラルネットワークの汎化性能を向上させる手法としてDropoutがあります.Dropoutは,学習の際に識別部の結合重みを限定する手法であり,単純な手法でありながら高い汎化性能の向上を実現しています.そこで,我々はDropoutのアルゴリズムに着目し,Dropoutの学習処理と識別処理に対するアルゴリズムを改良したRandom DropoutとEnsemble Inference Networks(EIN)を提案することで高精度な歩行者検出を実現しました.
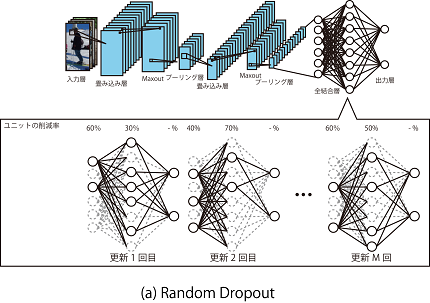
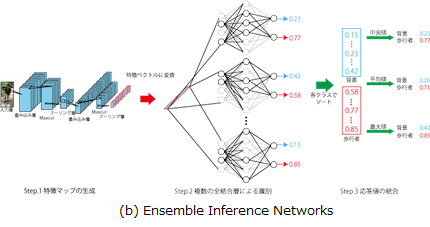
従来のDropoutを用いた学習時は,出力を0とするユニットの数を各更新で一定にしています.しかし,提案するRandom Dropoutは,各更新において出力を0とするユニットの数を常にランダムで指定する手法です.また,もう一つの提案手法であるEINでは,識別処理においてDropoutにより層間の結合重みをランダムに取り除いた複数の識別部のネットワークを構築し,各ネットワークの応答値から最終的な出力値を算出するアルゴリズムです.複数の異なる全結合層を持つネットワークから応答値を統合することで、誤検出を減らす効果があります.
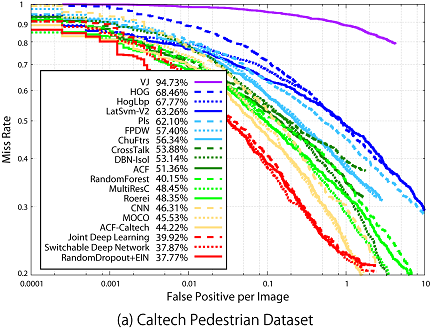
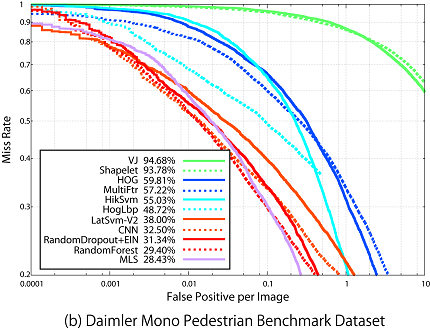
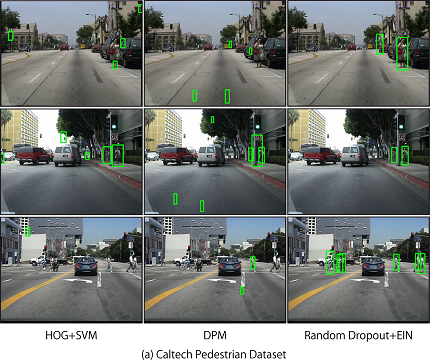
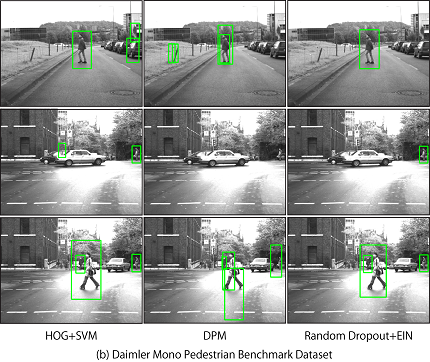
歩行者検出のベンチマークであるCaltech Pedestrian DatasetとDaimler Mono Pedestrian Datasetを用いて評価したとき,2つのベンチマークの結果において,従来の歩行者検出法と比べて高精度な歩行者検出を実現をしました.
回帰型Deep Convolutional Neural Networkによる人検出と部位の位置推定
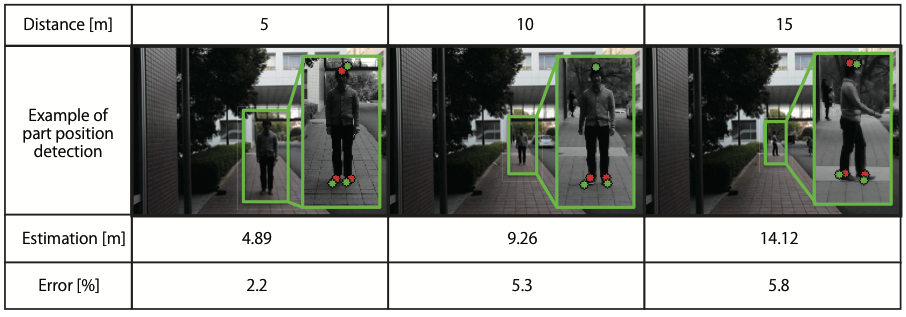
運転支援システムにおける歩行者検出は,歩行者の位置を検出するだけでなく,歩行者と車までの距離を推定することが重要になります.一般的な単眼カメラによる距離推定は,歩行者を検出した後に,上端と下端を検出し,検出した上端と下端の位置情報とカメラの内部パラメータから距離を推定しています.我々の研究ではDeep Convolutional Neural Networkを用いて,歩行者を検出すると同時に,頭部と両足の位置を高精度に推定する回帰型DCNNを提案します.実験では,歩行者検出のみを行う手法との精度比較により,歩行者検出精度を向上させることができ,頭部および両足の位置検出精度についても,位置検出のみの手法と比較して,精度を向上させることができました.また,歩行者の位置検出結果から,カメラの内部パラメータが既知の画像に対して距離推定を行ったところ,約5%の誤差で距離推定を行うことができた.
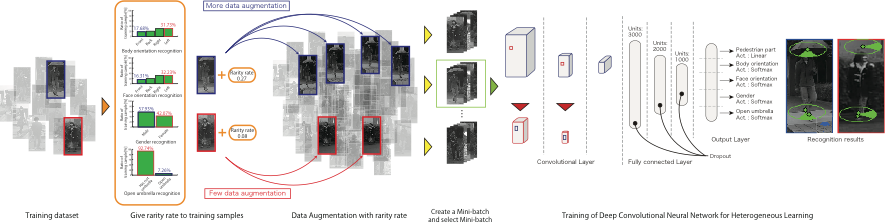
Heterogeneous Learningを用いた歩行者属性認識
自動車の走行時には,道路に飛び出す歩行者など数多く存在します.歩行者の飛び出し等を防止するために,歩行者の向きや性別等の属性情報を活用して歩行者の進行方向を予測する技術が必要になります.本手法では,Heterogeneous Learningを用いることで歩行者の身体と顔の向き,歩行者の頭部と両足,性別,傘をさしているかの5タスクを識別します.また,学習時に各タスクの学習サンプルに対して稀少度適用することで高精度な複数の属性認識を実現しています.