Joint特徴による人検出の高精度化とハードウェア化
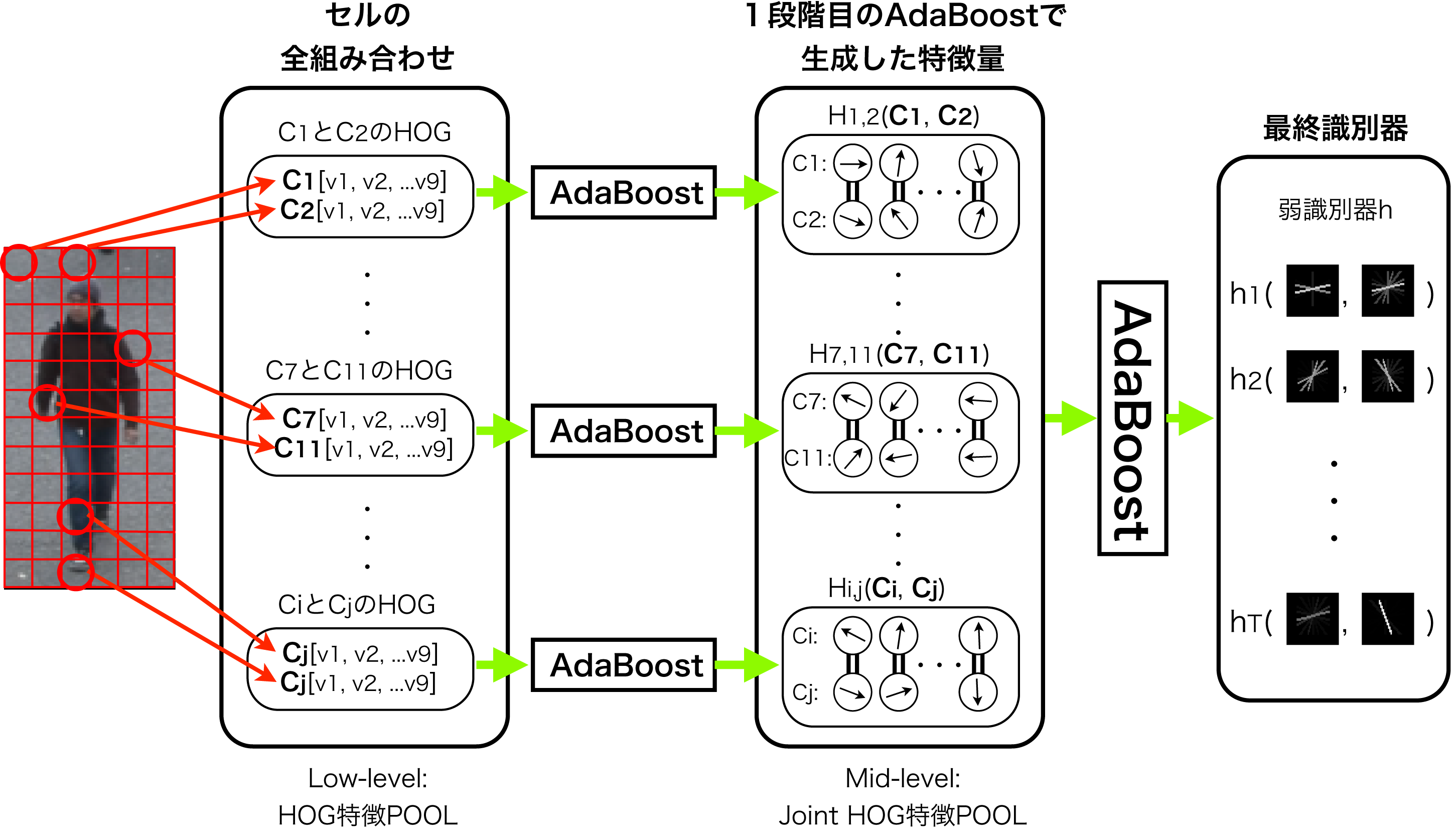
人検出は, 映像中から人の位置と大きさを特定する技術であり, セキュリティ, ITS(Intelligent Transport System), マーケティング等の分野での利用が期待されています. 人を検出するには, 頭から肩にかけてのΩに似た形状や上半身から下半身にかけての連続的な形状, 肩や足などの左右対称的な形状を捉えることが有効と考えられます. 我々は, 2段階のReal AdaBoostを用いて図に示すような物体形状の対称性や連続性を自動的に捉えるJoint特徴量による物体検出法を提案しています. 複数のLow-levelな特徴量をブースティングにより組み合わせることで特徴量間の関連性を捉えることができ, 高精度な検出が期待できます.
Joint特徴量と2段階のブースティング
1段階目のJoint特徴量を生成するために, 2つの異なる局所領域(セル)からLow-levelな特徴量を求め, 共起表現法により異なるセルの特徴量間の共起を表現します. そして、Real AdaBoostにより最も良い組み合わせを弱識別器として自動的に選択します. 2段階目では, 1段階目より生成したJoint特徴量を入力としてReal AdaBoostにより学習することで, 識別に有効なJoint特徴量を自動的に選択することが可能です. Joint特徴量のフレームワークは, 人のアピアランスを表すHOG特徴量に他の特徴量(例えば, 時空間特徴や距離特徴)を追加することが可能です. また、Joint特徴では, どのような局所領域が原因で検出に失敗するのかという原因の解析が容易という特長があります.
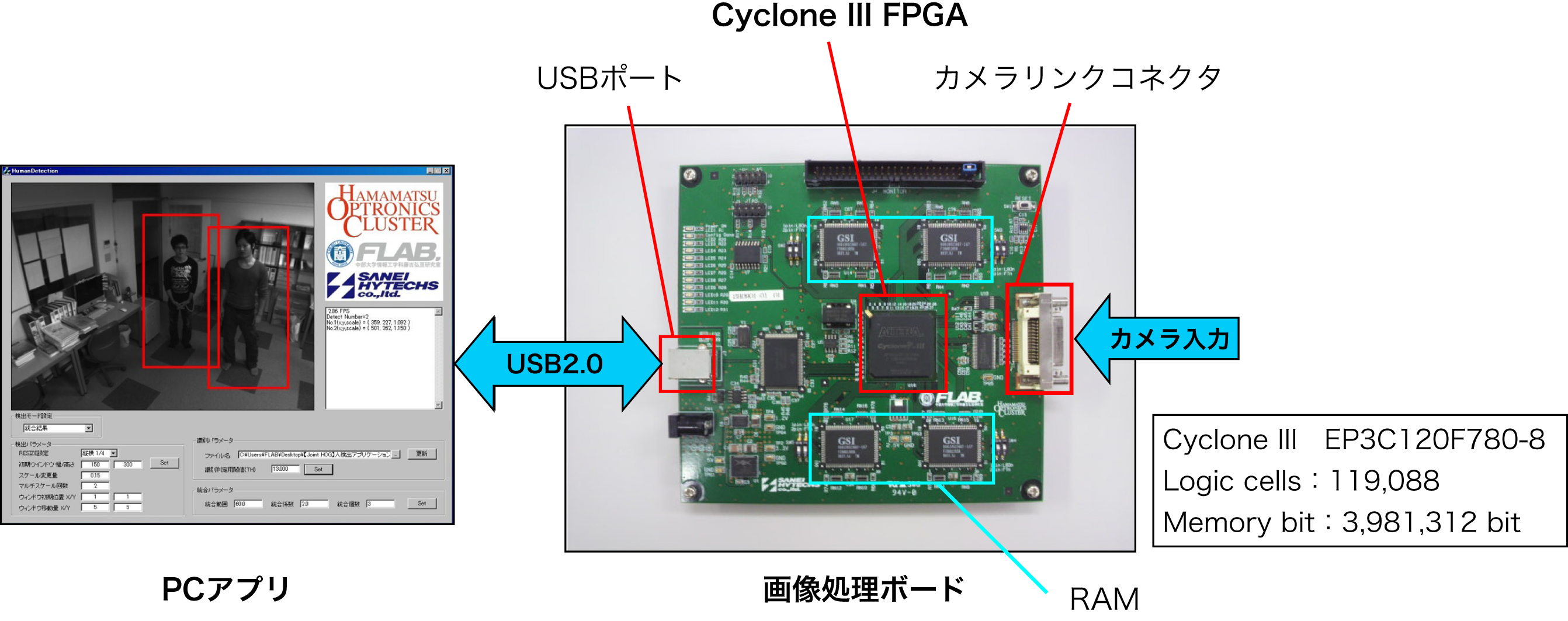
ハードウェア化:Joint-HOG FPGA
統計的学習法を用いた物体検出のハードウェア化では, 利用する環境下での検出対象を想定して学習した結果をハードウェア上に実装することになります. しかし, 利用環境が異なる場合や検出対象が変更となった場合, 再度ハードウェアを設計する必要があります. 我々は, ソフトウェアAPIと連動して同一ハードウェア上で検出対象を変更可能なJoint-HOGによるFPGAシステムを開発しました. Joint-HOG FPGAシステムでは, Altera 社製CycloneIII FPGAを使用し, カメラリンク入力された画像に対して検出します. 各演算ステージをパイプライン上に処理し, ウィンドウ毎の並列化と組み合わせて高速化することで, FPGA上でほぼ実用的な時間内(約20fps)での実行を実現しました.