Deep Convolutional Neural Networkによるセマンティックセグメンテーション
Semantic segmentation for CITYSCAPES DATASET by MNet_MPRG (overlay) from MPRG, Chubu University on Vimeo.
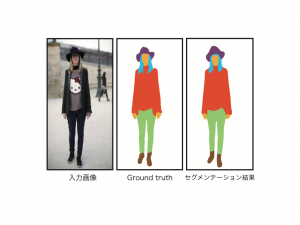
セマンティックセグメンテーションは,画像中のシーンを理解する上で重要な認識タスクです.一般的な物体認識は,画像中の物体の位置とスケールを推定する技術ですが,セマンティックセグメンテーションは画像の各ピクセルが何の物体なのかを認識する技術です.Deep Convolutional Neural Network(DCNN)を用いたセマンティックセグメンテーションの研究は活発に研究されており,代表的な手法としてSegNetやFully Convolutional Network (FCN)が提案されています.
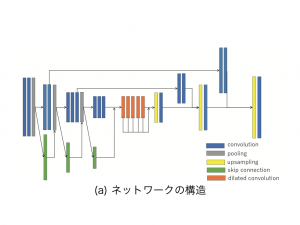
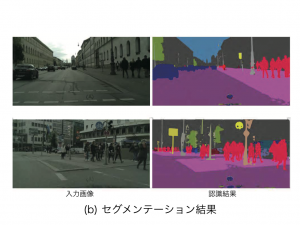
Multiple Dilated Convolutional Blocksによるセマンティクセグメンテーション
車載カメラ映像のセマンティックセグメンテーションは,歩行者や車両等の物体とカメラまでの距離により大きさが変動します.そのため,様々な物体の大きさに対応したMulti Dilated Convolution Blocksを提案します.Multi Convolution Blocksを構成している複数のDilated Convolutionにより,大局的な特徴と局所的な特徴を抽出することが可能です.車載カメラにおけるセマンティックセグメンテーションのベンチマークであるCityscape Datasetで評価した場合,Multi Dilated Convolution Blocksを導入することで一般的なセマンティックセグメンテーション手法より精度が向上していることが確認できます.
2D-QRNNを導入したセマンティックセグメンテーションの高精度化と高速化
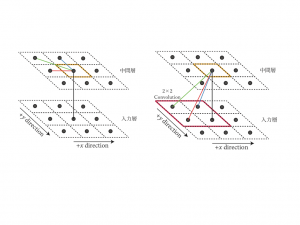
セマンティックセグメンテーションの高精度化を実現した手法として,DAG-RNNsが提案されています.DAG-RNNsは,2次元に拡張したRecurrent Neural Network (RNN)をDCNNに導入することで,広範囲の空間領域を文脈として捉えることが可能です.しかし,RNNの中間層はGPUの並列演算が不可能なため,識別時間が増加する問題が発生します.そこで,並列に時系列情報を扱えるQuasi-Recurrent Neural Network (QRNN)を2次元に拡張した2D-QRNNを提案することで,高精度かつ高速なセマンティックセグメンテーションを実現しました.
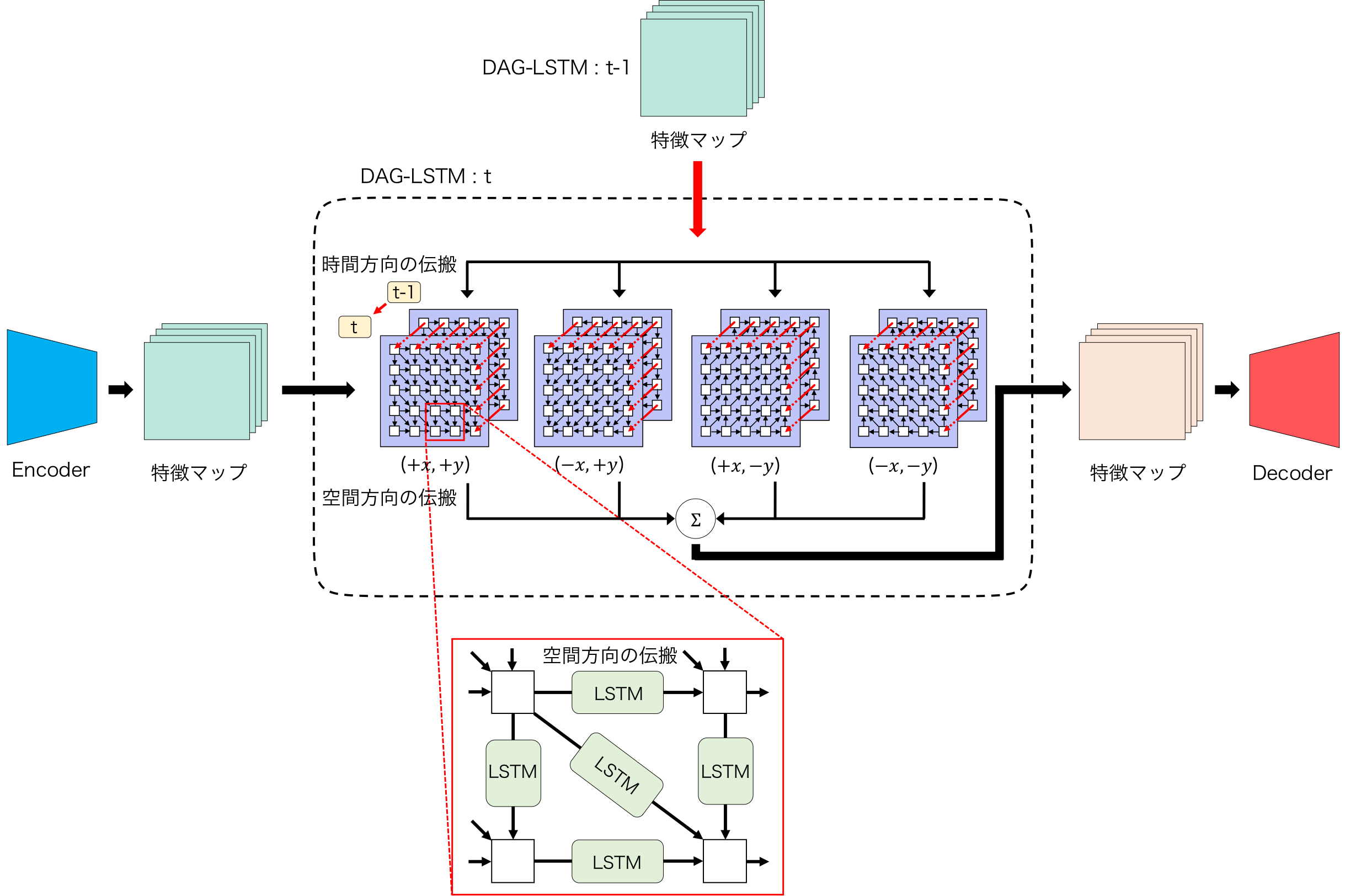
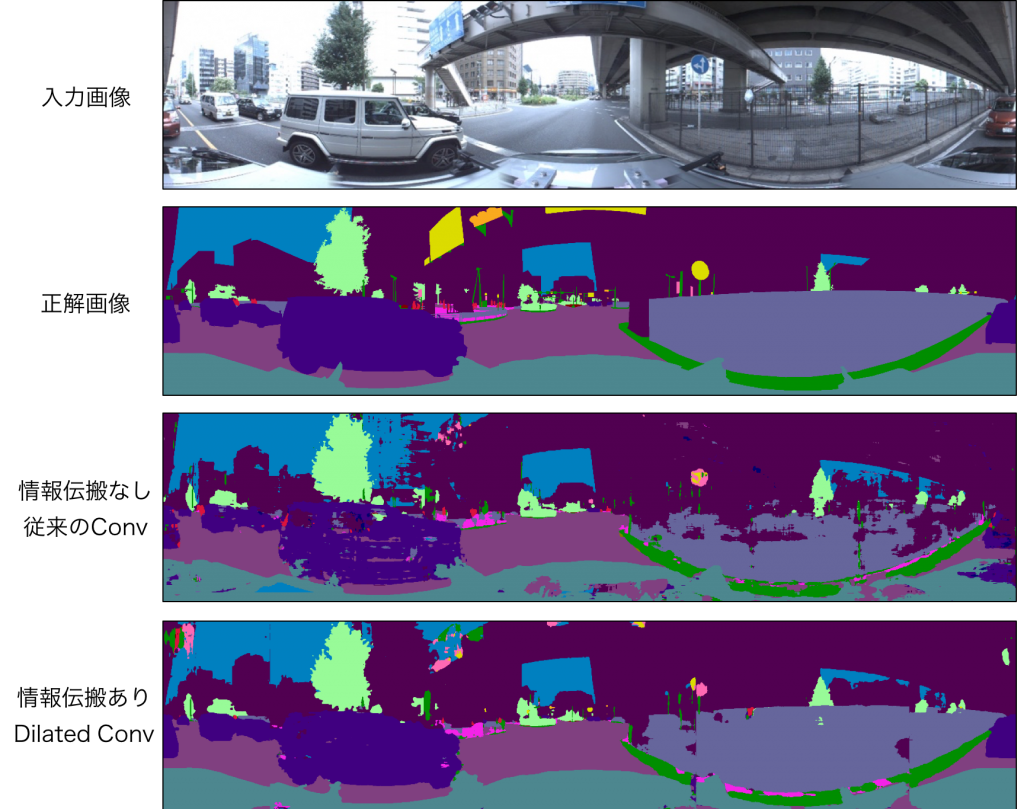
情報伝搬ネットワークによる全周囲のセマンティックセグメンテーション
車載映像からのセマンティックセグメンテーションを対象とした大規模なデータセットが公開されています.しかし,これまで公開されているデータセットは前方のみを対象としているので,車載環境における一部の状況しか理解することができません.そこで,左右・後方を含めた360度全周囲を対象としたデータに対するセマンティックセグメンテーション手法を提案します.時間方向及び空間方向に情報を伝搬させることで,一般的なセグメンテーション手法より高精度なセマンティックセグメンテーションを実現しました.