経路予測
経路予測とは,歩行者や自動車などの移動物体が未来にどのような道筋を移動するかを予測する問題です.現在,経路予測は自動運転による交通事故の防止やロボットの自律制御などに応用が期待されています.我々の研究では,予測対象の過去の座標に加えて様々な情報をネットワークの入力として用いることで,予測対象の移動経路を高精度に予測する研究に取り組んでいます.
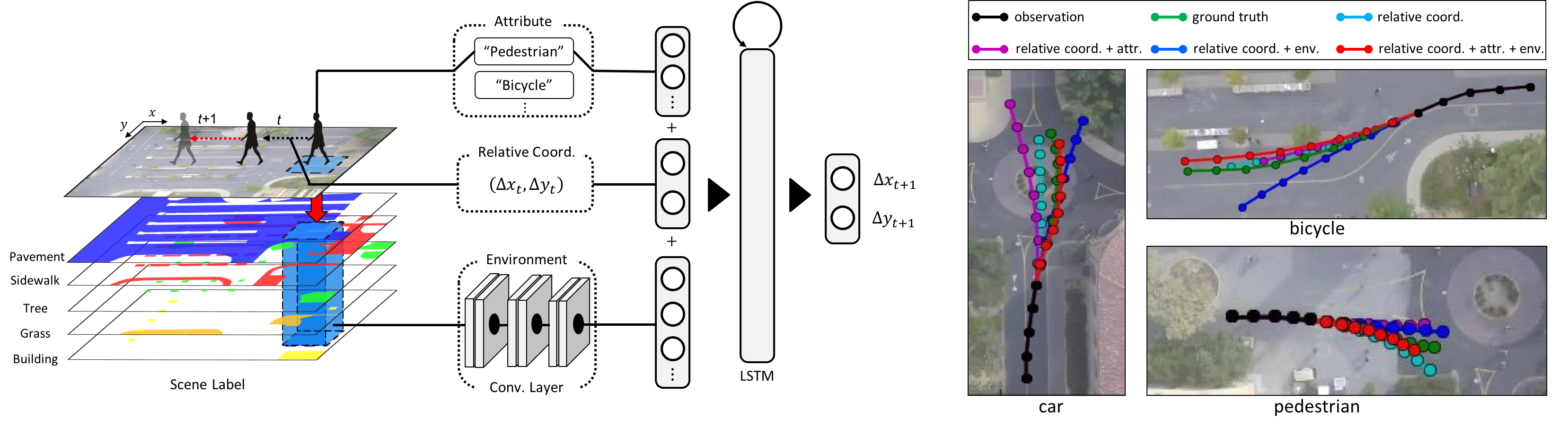
移動対象の属性と環境情報を導入したLSTMによる経路予測
近年の経路予測では,Long Short-Term Memory(LSTM)やConvolutional Neural Network(CNN)などの深層学習を用いた手法が多く提案されています.しかし,多くの従来手法では,全ての予測対象を単一の種類として扱っているため,予測対象の種類に応じた経路を予測することは困難となります.我々の研究では,予測対象の種類に応じた経路予測の実現を目的とし,対象の属性および予測対象周囲の環境情報を導入した経路予測手法を提案します.対象の過去の移動情報に加え,属性および周囲の環境を導入することで,対象毎に適した経路の予測が可能となります.評価実験では,属性および環境に関する特徴を入力することで,高精度な予測を実現しました.
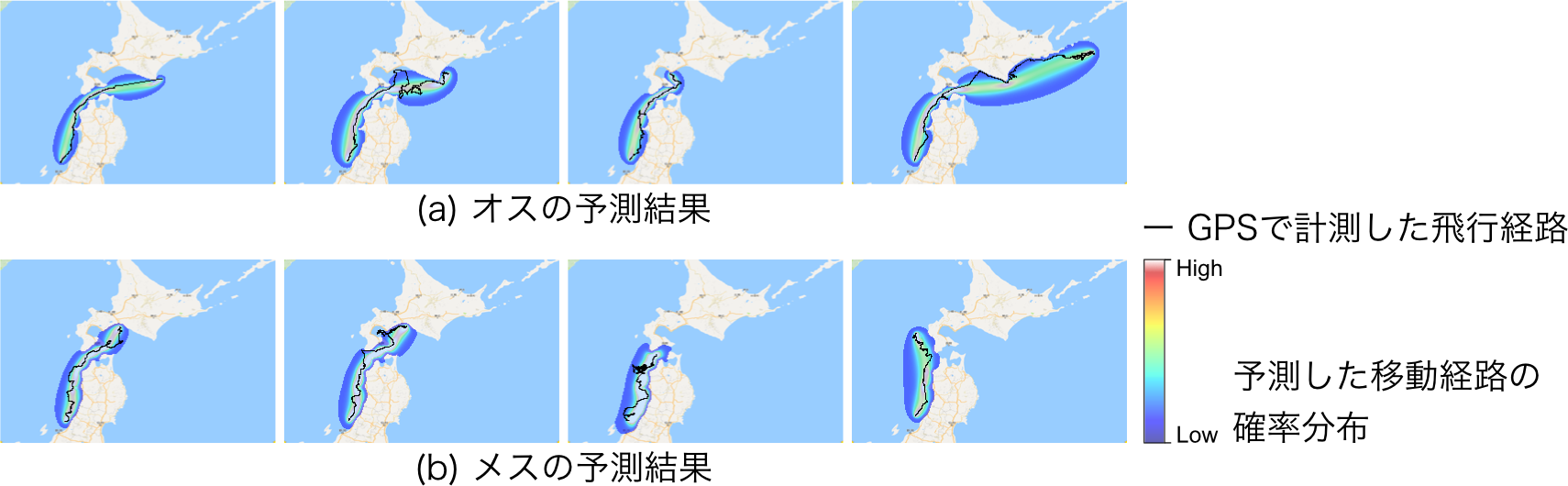
逆強化学習を用いたオオミズナギドリの経路予測
多くの経路予測手法では人間を対象として,動画像やLiDARで取得した3次元データが用いられています.この研究では,他の生物への応用例として,オオミズナギドリの飛行経路の予測に取り組んでいます.具体的には,GPSで計測した海鳥の飛行データと海および陸地の環境マップを用いて,maximum entropy inverse reinforcement learningを適用することにより,オオミズナギドリの行動規範を獲得します.獲得した行動規範を用いることで,予測開始地点から目的地までの移動経路を確率分布として出力します.
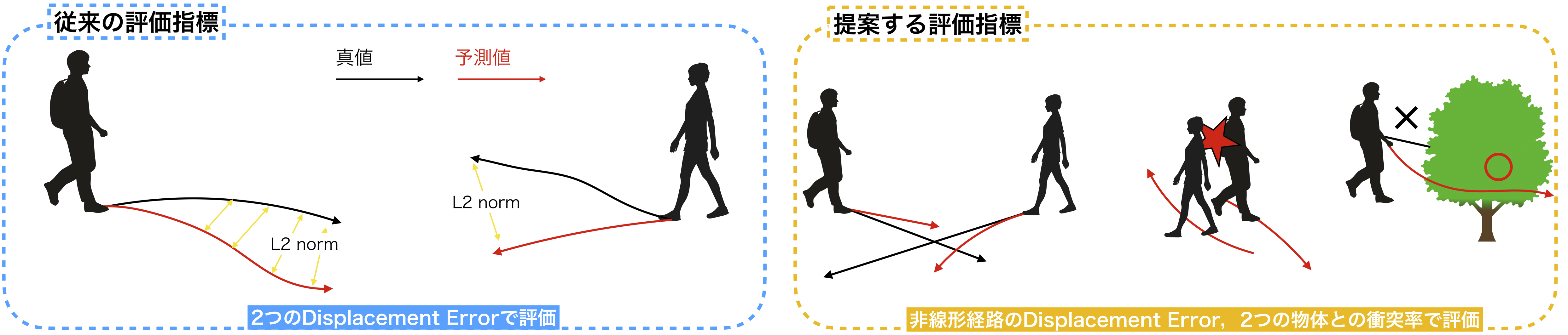
衝突インタラクションを考慮した経路予測における評価指標の提案
予測対象同士の衝突を避けるインタラクションを考慮した経路予測の評価指標には,真値と予測値のユークリッド距離を求めるDisplacement Errorが用いられています.この評価指標は,各時刻の誤差の平均または,最終時刻の誤差を全データに対して算出して評価しています.しかしながら,予測対象の数に対して平均を求めるため,衝突インタラクションがどの予測経路に効果的なのか正確に評価できない問題があります.そこで,本研究では衝突インタラクションを考慮した経路予測手法の効果を正確に評価するために,非線形経路に関する評価および,衝突率に関する評価指標の2つの評価指標を提案します.非線形経路に関する評価を行うことで,深層学習をベースとした予測手法が線形な動きである場合に誤差が低減しているのか,非線形の場合に誤差が低減しているのかを明確にできます.衝突率に関する評価を行うことで,衝突インタラクションの処理が効果的なのかを定量的に確認できます.従来の予測手法を提案した評価指標を用いて評価したところ,衝突インタラクションを十分に考慮できていないことを確認しました.