Human Support Robot (HSR)
Human Support Robot (HSR)は,トヨタ自動車が開発した生活支援ロボットであり,障がい者や高齢者の自立生活を支援することを目的としています.HSRは家庭や介護施設などでの活用を想定しており,物の運搬や環境の認識,ユーザーとのコミュニケーションなど、様々な分野に渡る研究が行われています.また,中部大学が国内で初めてこのロボットを導入し,研究開発に活用しています.

研究概要
ロボットの自律移動に対して,深層強化学習を用いてエージェントと環境との相互作用による最適な行動を学習することで,未知の環境においても柔軟に適応し,安全かつ効率的に移動することが可能となります.また,Transformerモデルを導入することで,ロボットの注視領域を可視化し,判断の根拠をより明確にすることを実現しました.従来の手法と比較して計算コストを抑えつつ,高速なリアルタイム処理を可能にし,ロボットの動作の精度を向上させました.さらに,複合現実(MR)を活用してロボットの意思決定を3D空間上に視覚的に表示することで,ユーザーがロボットの判断を直感的に理解しやすくなっています.
判断根拠の可視化
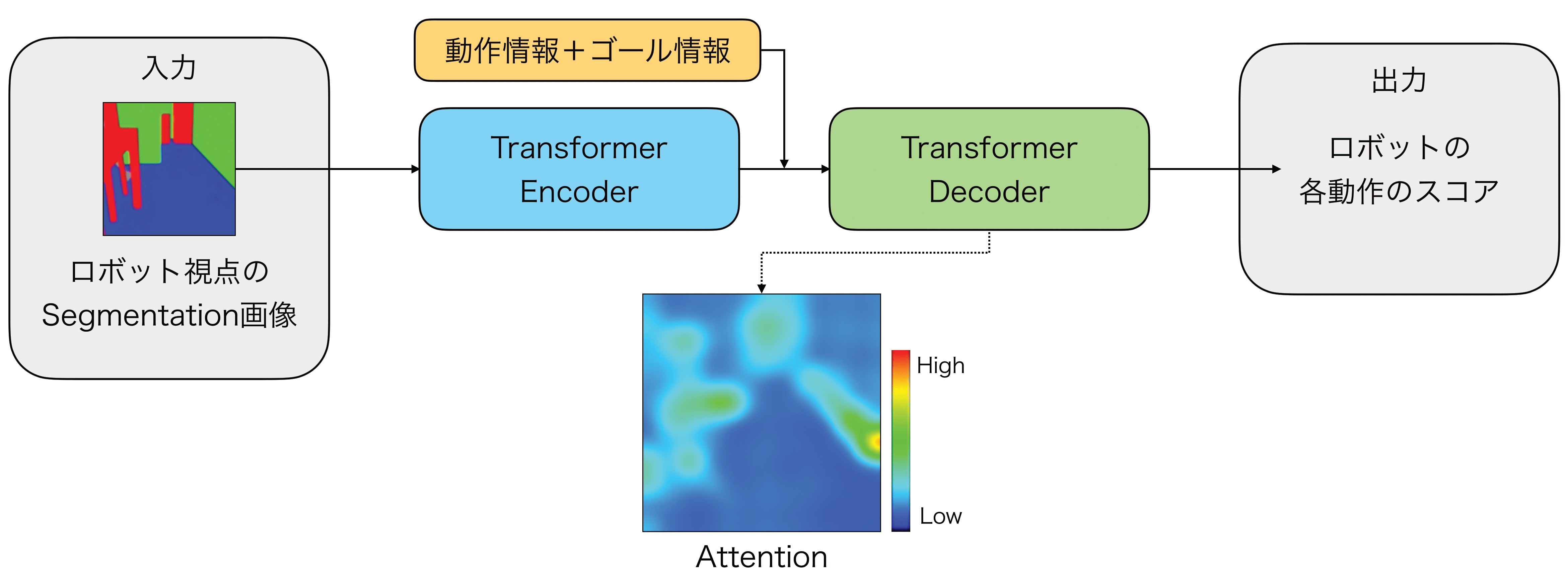
ロボットの自律移動における判断根拠を明確にするため,Transformer (Encoder-Decoder) モデルを導入し,Attention を活用してロボットの注視領域を可視化します.Encoder によって入力された視覚情報がどのように変換され,Decoder によってどの行動が選択されるかを解析します.特に,Decoder では各行動に関連する Attention を計算し,どの領域が重要視されているのかを視覚的に示します.
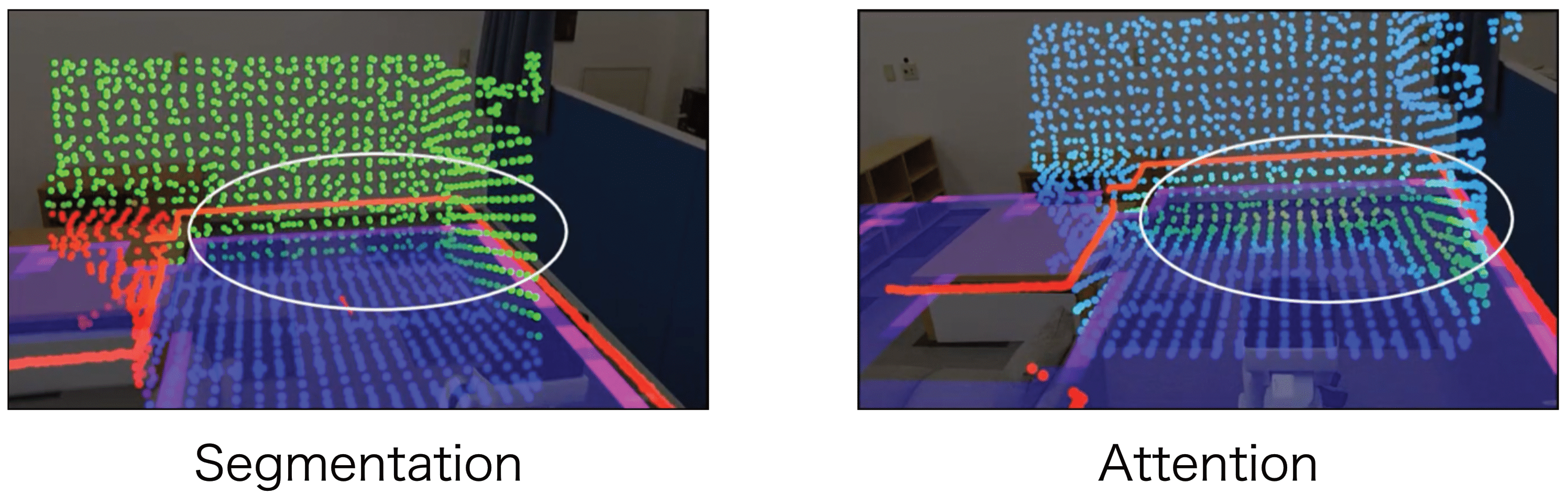
最も注目度が高い行動に対応する Decoder の Attention を抽出し,ロボット視点の深度情報を用いた点群データ上に投影します.この投影では,Attention の値に応じて色付けを行い,値が大きい領域ほど赤く,小さい領域ほど青く表示しています.この可視化により,ロボットが環境内のどの部分を判断根拠として動作を決定しているかを直感的に理解することができます.また,この情報を MR技術を用いて実空間に重畳することで,ユーザはロボットがどの領域を注視しているかをリアルタイムで把握できます.MRヘッドセットを装着したユーザは,ロボットの動作と目の前の環境を見ながら確認でき,判断根拠の理解がより容易になります.この方法により,単なる 2D 画像による可視化と比較して,ユーザが物理空間との対応関係をより直感的に把握することが可能です.